


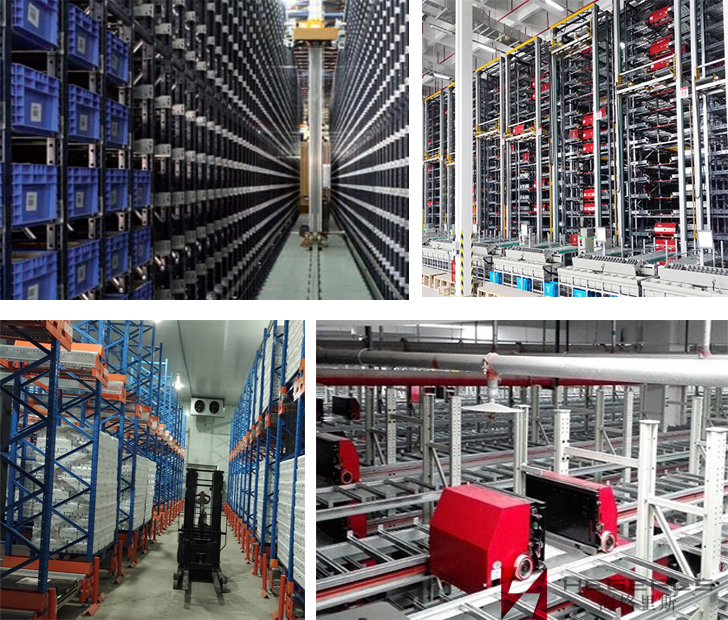
În ultimii ani, odată cu popularitatea continuă a internetului, comerțul electronic s-a dezvoltat rapid. Mărfurile comandate de clienți prezintă caracteristicile multor soiuri, loturi puține și perioadă scurtă de livrare, ceea ce face ca densitatea de depozitare a raftului în centrul de distribuție logistică al furnizorului să se îmbunătățească continuu. Frecvența materialelor care intră și ies din depozit este în creștere. Numărul de cules de piese mici crește pe zi ce trece. Din ce în ce mai multe centre de distribuție logistică utilizează sistemul de transport de mărfuri pe bază de mașini către oameni.
HEGERLS (Hebei Walker Metal Products Co., Ltd.
Furcile telescopice de prindere sunt utilizate pe scară largă în echipamentele automate de depozitare, cum ar fi mașinile cu navetă multistrat stereo pentru depozitare, coșurile de tip raft AGV, RGV și mini-încărcătura. Greutatea maximă a cutiei de material ținută de HEGERLS poate ajunge la 50Kg. Lățimea de prindere a brațului furcii poate fi ajustată în mod arbitrar în intervalul de 200 ~ 600 mm. Cursa maximă de ridicare este de 840 mm. Viteza maximă de operare a furcii telescopice este de 1,5 m/s, iar accelerația este de 1,2 m/s²。 Zgomotul de funcționare este controlat în 75 dB, ceea ce poate îndeplini cerințele majorității rafturilor cu extensie simple și duble. HEGERLS poate personaliza, de asemenea, depozitul stereoscopic multistrat al cutiei de furci telescopice de prindere, în funcție de cerințele specifice ale clienților, cum ar fi lățimea de prindere, cursa de ridicare și alți parametri.
Piesele din cutia de furcă telescopică prinsă Hiygris HEGERLS cu navetă multistrat pentru mașină stereo depozit Furca telescopică este un mecanism telescopic utilizat în depozitul stereo și sistemul de stocare automată logistică pentru depozitarea sau transferul materialelor. Are funcție de extindere automată flexibilă în două sensuri și funcție de limită precisă! Poate fi montat direct pe stivuitor, sau montat pe un mecanism de ridicare fix, sau montat pe o platformă de ridicare mobilă. Stivuitorul străbate drumul dintre rafturi pentru a accesa sau transfera automat articolele! Poate fi conectat cu sistemul de linie de producție și sistemul de management al întreprinderii. Utilizează computerul și tehnologia codurilor de bare (encoder) pentru a realiza gestionarea și funcționarea inteligentă a informațiilor!

Despre furca telescopică de prindere HEGERLS
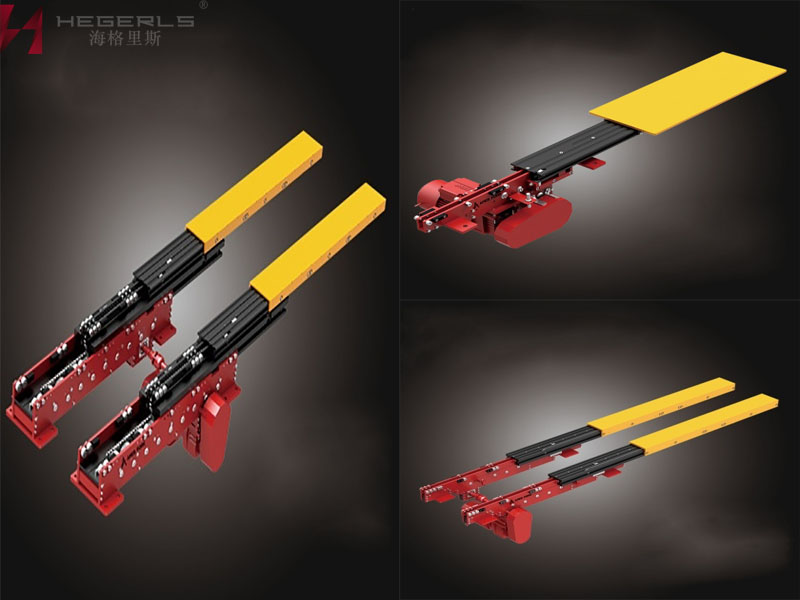
Furca de prindere telescopică HEGERLS este un tip unic de furcă în seria furcilor telescopice de stivuitoare, și anume, o furcă de prindere telescopică automată bidirecțională, cunoscută și sub denumirea de furcă de prindere sau furcă de prindere, o furcă sau o furcă de furcă. . Este o furca folosita special pentru transferul pubelelor mici. Poate fi asamblat direct pe un AGV de picking cu mai multe etaje sau alte platforme de lucru, cu extinderea brațului furcii și ambreiajul pârghiei (cârlig), Finalizează acțiunea de acces sau transfer!
Furca de prindere HEGERLS este fabricată în mare parte din aliaj de aluminiu, având dimensiuni mici, greutate redusă, viteză de rulare rapidă și expansiune lină. În același timp, adoptă și principiul sincronizării multimotoare, realizând că același mecanism de furcă telescopică poate fi utilizat pentru a transfera sau accesa cutii cu specificații diferite. Nu numai că îmbunătățește eficient eficiența stocării, dar și îmbunătățește considerabil rata de utilizare a spațiului de stocare, în special pentru depozitarea inteligentă intensivă în înălțime!
Clip HEGERLS pe structura furcii telescopice
Structura furcii de prindere HEGERLS poate fi împărțită în locație de depozitare adâncă și locație de depozitare la mică adâncime. O locație de depozitare adâncă este o locație de depozitare cu două cutii de materiale, iar o locație de depozitare mică este o locație de depozitare cu o cutie de materiale. Adică, o locație de depozitare adâncă poate prinde două cutii de material simultan, în timp ce o locație de depozitare mică poate prinde doar o cutie de material la un moment dat. Diferența dintre furca de prindere HEGERLS și furca telescopică duplex obișnuită este că furca de tragere cu degetul este încă compusă din trei corpuri de furcă, și anume, corpul interior al furcii, corpul furcii din mijloc și corpul furcii exterior, cu excepția faptului că corpul furcii din față. are încă o tijă de tracțiune (cârlig), care se potrivește cu șina de ghidare (șină de glisare), bară cu role, roată sincronă, centură sincronă, bară fluent, tijă de schimbare (cârlig), arbore de cric, bară de roată, motor de antrenare (servo) , motor tija schimbătorului Instrumentul de detectare și alte componente formează un mecanism telescopic complet, care cooperează cu brațul furcii telescopice și ambreiajul pârghiei (cârlig) pentru a finaliza acțiunea de acces sau transfer!
Principiul de funcționare al clemei HEGERLS pe furca telescopică
Brațul furcii al furcii de prindere HEGERLS este lateral și conectat lateral printr-o șină de ghidare. Prin control, șina de ghidare poate aluneca înainte și înapoi pentru a regla distanța dintre cele două brațe ale furcii ale furcii, astfel încât să se realizeze utilizarea obișnuită a unei furci pentru cutiile de materiale cu mai multe specificații! La ridicarea materialelor, furca se extinde în poziția de depozitare a materialului, cârligul de reținere (pârghia) coboară și blochează automat partea de capăt a cutiei de carton sau a cutiei de plastic, iar apoi furca se retrage, trăgând cutia sau cutia de plastic până la mijlocul acestuia. furca și apoi se deplasează în sens invers în funcție de cerințele gradului, cârligul (pârghia) este tras înapoi și furca se retrage din nou pentru a finaliza sarcina de ridicare sau transfer! Deși principiul furcii de prindere este același cu cel al furcii telescopice obișnuite, piesele de transmisie, bielele și alte componente ale furcii cu degete sunt foarte diferite. Este folosit pentru a descrie faptul că roata lanțului, lanțul, angrenajul, cremaliera etc. sunt toate înlocuite cu roți sincrone, curele sincrone etc., în timp ce brațul culisant folosește șine de ghidare, iar materialele corpului furcii sunt toate înlocuite cu foi de metal. sau materiale din aliaj de aluminiu, astfel încât greutatea furcii de prindere este de numai aproximativ 80 kg.
În plus, trebuie remarcat faptul că, în timpul proiectării furcii telescopice de tip gripper, dimensiunea raftului dens de depozitare, poziția verticală a raftului cu cutii, nivelul șinei și dimensiunea cutiilor trebuie combinate pentru a determina parametrii de ansamblu ai furcilor de extensie (miscarea furcii de extensie, distanta cutii, latimea furcii, latimea interioara a furcii, inaltimea furcii etc.), astfel incat sa satisfaca nevoile containerelor de pe rafturi. Furca de prindere poate transfera sau accesa numai eficient produsele ambalate în cutii de carton sau cutii de plastic și nu poate transfera materiale neregulate. În plus, volumul și greutatea cutiei de material transferat nu trebuie să fie prea mari, iar greutatea încărcăturii nu trebuie să depășească 100KG! Înălțimea furcii de prindere este în general proiectată în funcție de înălțimea coșului!
Despre HEGERLS Clip on Shuttle
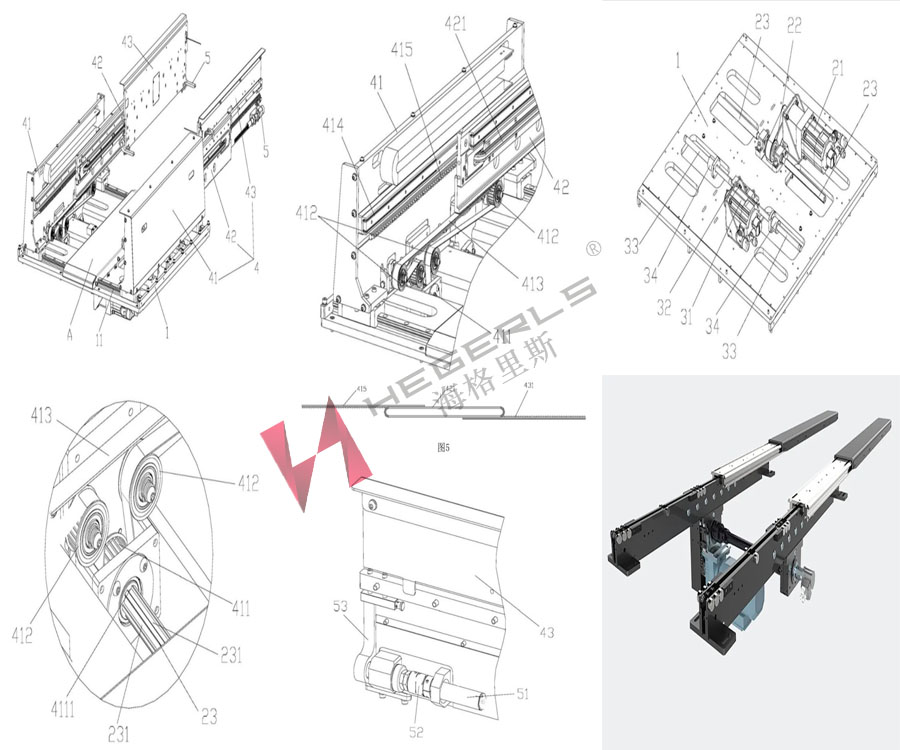
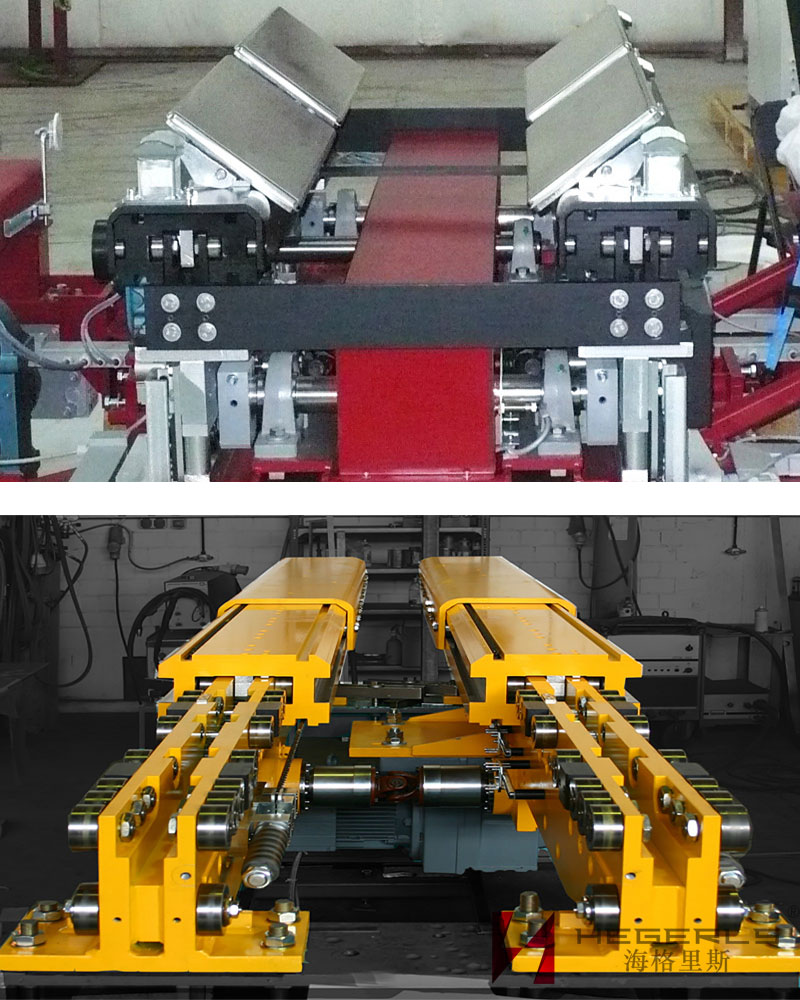
Structura navetei cu clipă HEGERLS constă din cadru navetă, șasiu navetă, mecanism de deplasare, mecanism secundar de extensie a furcii, colector, placă de rulment și platformă de rulment. Structura este următoarea:
Orice cadru de navetă este de obicei o cavitate închisă compusă din suporturile corpului principal pe ambele părți, carcasa și suportul butucului interior și, respectiv, este dispusă la ambele capete ale șasiului navetei; Carcasa este prevazuta cu un capac superior care poate fi deschis si inchis printr-o balama de usa rotativa; Un suport de sârmă de panou este aranjat deasupra suportului butucului; Mecanismul de deplasare cuprinde o roată motoare, o roată pasivă, un motor DC fără perii, un reductor și un arbore de legătură; Ambele părți ale cadrului navetei de la un capăt al șasiului navetei sunt prevăzute cu roți motoare legate prin arbori de legătură, iar ambele părți ale cadrului navetei de la celălalt capăt al șasiului navetei sunt prevăzute cu roți pasive legate prin arbori de legătură; Motorul DC fără perii cooperează cu reductorul pentru a antrena roata motoare și a antrena roata pasivă; Arborele de legătură este prevăzut cu un encoder magnetic, prin care se obțin pozițiile de pornire și oprire ale navetei pe calea dreaptă; Un mecanism secundar de extensie a furcii este dispus simetric pe partea interioară a cadrului vagonului navetă; Sasiul navetei dintre mecanismele secundare de extensie a furcii este prevazut cu o platforma portanta pentru amplasarea cosului de marfa; Cavitatea închisă a cadrului vagonului navetă este respectiv prevăzută cu o placă de reazem, pe care sunt dispuse succesiv o placă de antrenare, o placă principală de comandă a mecanismului de deplasare și o placă principală de comandă a mecanismului de extensie a furcii; Placa de antrenare antrenează mecanismul de deplasare pentru a conduce naveta să ruleze pe calea dreaptă. Panoul de control principal al mecanismului de deplasare controlează parametrii de funcționare și pozițiile de pornire a opririi navetei, iar panoul de control principal al mecanismului de extensie a furcii controlează mecanismul secundar de extensie a furcii pentru a apuca și plasa coșul pe raft; Între vagonul cu navetă și calea dreaptă este amplasat un dispozitiv de colectare, care este conectat cu firul electrificat dispus în interiorul căii drepte și folosit pentru alimentarea vagonului cu navetă. Caracteristica structurală a clemei de pe vagonul cu navetă inteligentă pentru depozitare constă, de asemenea, în aceea că canelurile sunt fixate în pozițiile în care roata motoare și respectiv roata pasivă contactează arborele de legătură, iar un inel elastic de reținere este fixat în canelura pentru a forma partea axială. poziţionarea roţii motoare şi a roţii pasive. Roțile de ghidare duble sunt, respectiv, așezate pe partea laterală a șasiului navetei, sub roata motoare și roata pasivă, și între calea dreaptă și șasiul navetei. Roțile de ghidare duble formează limitele din stânga și din dreapta atunci când roata motoare și roata pasivă rulează pe cale dreaptă. Mecanismul secundar de extensie a furcii include: placa de împingere a extensiei furcii de primul nivel, placa de extensie a furcii de al doilea nivel, mecanismul de scripete sincron de al doilea nivel, mecanismul de antrenare a extensiei furcii de al doilea nivel, motorul de antrenare a extensiei furcii, un alt reductor și arborele de antrenare ; Partea exterioară a suportului butucului cadrului vagonului navetă este prevăzută cu o placă de împingere a extensiei furcii în prima etapă; Un jgheab în formă de U este dispus în mijlocul plăcii de împingere a furcii din prima treaptă, iar mai multe scripete de jgheab în formă de U sunt aranjate la intervale egale în jgheabul în formă de U; O placă de furcă secundară este dispusă în afara jgheabului în formă de U; Placa de furcă secundară este conectată cu mai multe scripete cu caneluri în formă de U prin șuruburi și piulițe; Capetele superioare ale plăcii de extensie a furcii din a doua etapă sunt prevăzute cu o furcă de schimbare, un motor reductor planetar DC și un senzor fotoelectric din exterior spre interior; Senzorul fotoelectric este utilizat pentru a obține semnalul de poziție al furcii și a-l trimite către panoul de control principal al mecanismului de extensie a furcii, care controlează motorul reductor planetar DC pentru a conduce furca să se miște orizontal sau vertical; Un mecanism de scripete sincron secundar este aranjat respectiv pe placa de împingere a furcii primare și direct sub și deasupra jgheabului în formă de U; Mecanismul de scripete sincron secundar este conectat cu placa de presare a curelei sincrone de pe placa de extensie secundară a furcii; Motorul de antrenare a extensiei furcii și un alt reductor antrenează mecanismul de antrenare a extensiei furcii secundare pentru a se muta și antrenează mecanismul de antrenare a extensiei furcii secundare pe cealaltă parte pentru a se deplasa prin arborele de antrenare, astfel încât placa de împingere a extensiei furcii primare să se miște și să antreneze secundarul. mecanismul scripetelui sincron să se miște, conducând astfel placa secundară de extensie a furcii să se miște. Mecanismul de transmisie cu extensie a furcii în două trepte cuprinde un encoder magnetic, un scripete de curea sincron I, o curea sincronă I, un dispozitiv de roată de tensionare și un cremalier; O curea de distribuţie 1 şi o curea de distribuţie 1 sunt dispuse sub placa de împingere a furcii din prima treaptă; O parte a scripetei curea sincronă I este conectată cu arborele de transmisie, iar cealaltă parte este conectată cu arborele de ieșire al celuilalt reductor prin canalul de cheie. Dispozitivele de roată întinzătoare sunt, respectiv, montate pe ambele părți ale celuilalt reductor pentru fixarea auxiliară a scripetei curelei sincrone I și a curelei sincrone I; Un suport este aranjat între placa de împingere a furcii din prima etapă și cureaua sincronă; Motorul de antrenare a extensiei furcii și un alt reductor antrenează roata curelei sincrone I și cureaua sincronă I să se rotească și antrenează scripetele curelei sincrone II și cureaua sincronă II pe cealaltă parte să se rotească prin arborele de transmisie. În același timp, rafturile de pe ambele părți antrenează placa de împingere a extensiei primare a furcii corespunzătoare pentru a obține extensia primară a furcii. Când mecanismul secundar al scripetei curelei sincrone se mișcă sincron și conduce placa de extensie a furcii secundare să se miște, scripetele în formă de U se rostogolesc în jgheabul în formă de U, face ca placa de extensie secundară a furcii să realizeze extensia secundară a furcii. Dispozitivul roții de tensionare include: șurub, suport de reglare, piuliță dublă și roată de tensionare; O roată de tensionare este dispusă sub cureaua sincronă I și pe ambele părți ale celuilalt reductor și este fixată pe suportul corpului principal printr-o piuliță dublă; Un suport de reglare este aranjat sub piulița dublă prin șurub, iar poziția suportului de reglare este reglată de șurub, astfel încât suportul de reglare antrenează piulița dublă să se miște în sus și în jos, astfel încât cureaua sincronă I să poată menține stare de tensiune sub acţiunea roţii de tensionare.
Cum va conduce autobuzul HEGERLS beneficiile întreprinderii?
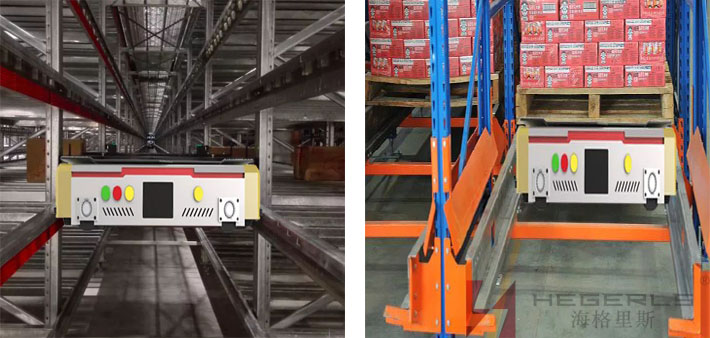
În primul rând, mecanismul de deplasare, mecanismul de extensie a furcii și cadrul, linia de contact glisantă și dispozitivul de colectare a energiei ale vagonului navetă inteligent HEGERLS cu clemă de depozitare sunt aranjate în mod rezonabil, ceea ce folosește pe deplin spațiul vagonului navetă și se poate adapta la stocarea și preluarea automată a mărfurilor cu diferite specificații și locații în depozitul tridimensional, extinderea acoperirii aplicației a mașinii de transfer și finalizarea rapidă și eficientă a unei serii de acțiuni continue ale mașinii de transfer, cum ar fi mersul pe jos, extensia furcii, alegerea sus și plasarea mărfurilor, Realizează stocarea rapidă și precisă a mărfurilor, îmbunătățind astfel foarte mult eficiența operațiunii și nivelul tehnologiei de automatizare a depozitului automat și reducând costurile de investiții ale întreprinderilor. În același timp, este simplu și ușor ca structură, de mare fiabilitate și ușor de întreținut. Poate înlocui stivuitorul tradițional de drum, realizând flexibilitatea sistemului și se conformează tendinței de dezvoltare a logisticii comerțului electronic și automatizării depozitării.
În al doilea rând, în mecanismul de deplasare al navetei inteligente HEGERLS, arborii de legătură ai roților motoare și roților pasive sunt prevăzute cu caneluri, iar părțile de legătură ale rulmenților sunt conectate printr-un nou tip de inel elastic de reținere, realizând efectul de poziționare axială al conexiunii. arbori; Prin utilizarea inelului elastic de reținere pentru a obține efectul de poziționare axială, eficiența producției poate fi crescută și costul poate fi economisit.
În al treilea rând: Vagonul navetă inteligent Higelis HEGERLS pentru depozitare realizează că roata motoare și roata pasivă se deplasează întotdeauna pe calea dreaptă fără a se abate de la cale prin structura roții de ghidare dublă. Această structură de poziționare este mai stabilă și mai fiabilă.
În al patrulea rând, structura secundară de extensie a furcii adoptată de vagonul inteligent HEGERLS poate mări distanța de extensie a furcii și poate obține mai multe coșuri în diferite poziții; În același timp, principiul mecanismului secundar de extensie a furcii este simplu, iar costul de proiectare și fabricație este scăzut; Partea de transmisie adoptă modul de un singur motor + reductor + arbore de transmisie pentru a face ca mecanismul de extensie a furcii secundare să atingă scopul extinderii și contracției sincrone, ceea ce economisește mai multe costuri, reduce în mod eficient spațiul necesar și reduce greutatea mașinii de transfer. .
În al cincilea rând, vagonul inteligent Higelis HEGERLS adoptă un nou tip de dispozitiv de tensionare a roții, care poate menține rapid cureaua sincronă tensionată și poate realiza funcționarea normală a vagonului navetă. În plus, acest dispozitiv de roată de tensionare este simplu de realizat, convenabil de instalat și poate fi ajustat rapid, ceea ce economisește costuri, economisește spațiu și îmbunătățește eficiența muncii.
Ora postării: 19-12-2022